上QQ阅读APP看本书,新人免费读10天
设备和账号都新为新人
1.3.2 环境绘图
环境绘图模块会创建地图数据,同时识别无人车的周围环境,实现避开障碍物、运动跟踪和运动规划的功能,具体包括占据栅格地图、定位图(Localization Map)和细节道路图(Detailed Road Map)这3种类型的地图,如图1-4所示。
1)占据栅格地图:占据栅格地图是利用激光雷达构建的栅格图,通过一组过滤器过滤掉激光雷达提供的数据里的噪点数据和动态对象数据。它由一组网格单元组成,且每个单元与其自身被占用的概率相关,这使得我们可以处理测量数据中的不确定性并随时间的推移改善地图的准确性,如图1-5所示。
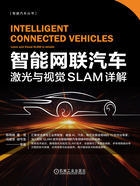
2)定位图:定位模块利用由激光雷达数据或相机数据构建的定位图来改进车辆的状态估计。在驾驶过程中,算法将传感器数据与该图进行比较以确定汽车运动状态,然后将该运动与其他车载传感器的信息进行组合以准确地定位车辆,如图1-6所示。

图1-4 环境绘图模块架构

图1-5 占据栅格地图

图1-6 定位图
3)细节道路图:细节道路图提供了关于路段地图的详细信息,表征无人驾驶车当前的驾驶环境。图里的车道信号和车道标记信息可以用于运动规划,并且该地图包含预先录制的地图数据和由感知传感器收集的当前环境的相关信息,如图1-7所示。
环境绘图和环境感知模块可以互补,协同使用。环境感知模块提供的环境信息可以用于更新细节道路图,而反过来,细节道路图也能帮助环境感知模块中的预测物体运动模块实现更加准确的预测。

图1-7 细节道路图